RealSense 學習筆記/教學/分享 (一):Hello World
當然 所有程式的開始都是 Hello World
這個也不例外
第一個功能,就是開啟相機,然後偵測畫面中央的深度距離相機多遠
我的成果如下:
https://github.com/soarwing52/RealsensePython/blob/master/phase%201/Hello%20World.py
----------------------------------------------------------------
求助區
目前對於
syncer
poll_for_frame - 4/23已解
playback().seek - 4/24 嘗試中
這幾個我還無法成功使用 麻煩有看到的前輩指導了
然後目前還有拍照的的時候落幀的問題
必須關掉自動曝光才能夠完整錄到
但是當然需要自動曝光才能夠實際外拍啊
4/24:
poll_for_frames因為可以回傳Null值,所以如果接收端有Null就會error
加上一段:
if not depth_frame or not color_frame:
continue
就可以了
這邊稍微提到一下,接下來是這次主要提取的一些屬性
這個也不例外
第一個功能,就是開啟相機,然後偵測畫面中央的深度距離相機多遠
我的成果如下:
https://github.com/soarwing52/RealsensePython/blob/master/phase%201/Hello%20World.py
----------------------------------------------------------------
求助區
目前對於
syncer
poll_for_frame - 4/23已解
playback().seek - 4/24 嘗試中
這幾個我還無法成功使用 麻煩有看到的前輩指導了
然後目前還有拍照的的時候落幀的問題
必須關掉自動曝光才能夠完整錄到
但是當然需要自動曝光才能夠實際外拍啊
4/24:
auto_exposure_priority關掉就解決了
------------------------------------------------------------------
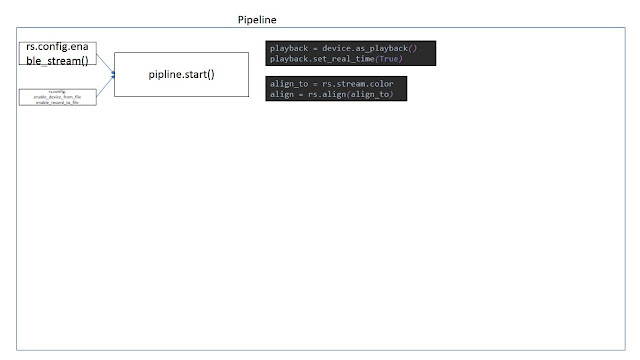
那麼就開始吧
pipeline = rs.pipeline()
pipeline.start()
這就是一切的開始,pipeline就是所有影像處理的整個流程名稱
所以要開始處理影像,就是打開pipeline

接下來,就是相機的參數了
config = rs.config()
config.enable_stream()
開啟影像串流,讓相機傳輸影像到電腦
可以使用的參數是:(stream type,resolution, image format, fps)
config.enable_stream(rs.stream.depth, 640, 360, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
可以選 可見光 遠紅光 深度,基本上就是viewer 裡面看的到的選項
解析度 然後 深度就是z16 可見光可以選 RGB BGR 灰階
FPS:6/30/60

然後接下來開始擷取影像,用try加上while loop讓影像一幀接一幀送過來
Try:
while True:
Except Runtimeerror:
No frames came or ended
Finally:
pipeline.stop()
而以上的獲取幀數方式在rs.syncer裡面也是相同的,不過目前我還沒辦法讓syncer作用
然後還有一個
rs.frame_queue()
這個是可以先把影像存在記憶體中,等到有資源時再處理,主要是避免在串流即時影像時因為資源不夠而落幀

------------------------------------------------------------------
那麼就開始吧
pipeline = rs.pipeline()
pipeline.start()
這就是一切的開始,pipeline就是所有影像處理的整個流程名稱
所以要開始處理影像,就是打開pipeline
接下來,就是相機的參數了
config = rs.config()
config.enable_stream()
開啟影像串流,讓相機傳輸影像到電腦
可以使用的參數是:(stream type,resolution, image format, fps)
config.enable_stream(rs.stream.depth, 640, 360, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
可以選 可見光 遠紅光 深度,基本上就是viewer 裡面看的到的選項
解析度 然後 深度就是z16 可見光可以選 RGB BGR 灰階
FPS:6/30/60
然後接下來開始擷取影像,用try加上while loop讓影像一幀接一幀送過來
Try:
while True:
Except Runtimeerror:
No frames came or ended
Finally:
pipeline.stop()
然後當沒有幀送過來時 結束
這就是最基本的接收影像流程。
而接受幀數的流程 在pipeline裡面有幾個選項
frame = pipeline.wait_for_frames()
depth_frame = frame.get_depth_frame()
color_frame = frame.get_color_frame()
這就是我在這次使用的,先接收,然後從接收到的幀裡面取出深度以及RGB影像
而pipeline有幾個獲取幀的方式:
這就是最基本的接收影像流程。
而接受幀數的流程 在pipeline裡面有幾個選項
frame = pipeline.wait_for_frames()
depth_frame = frame.get_depth_frame()
color_frame = frame.get_color_frame()
這就是我在這次使用的,先接收,然後從接收到的幀裡面取出深度以及RGB影像
而pipeline有幾個獲取幀的方式:
poll_for_frames()
|
立即獲取,不過目前我還沒有能成功使用
pipeline.poll_for_frames(rs.frame())
這是我在範例裡面看到的,不過回傳錯誤
表示我的frame裡面有兩個物件
會在frame篇裡面提到
這裡的描述是說 有畫面回傳1 沒有回傳0
|
wait_for_frames()
|
他會獲取一幀之後暫停串流,然後直到獲取下一幀
不過我使用結果之後,在深度跟RGB影像配對上出了問題
|
try_wait_for_frames
|
這個應該就是在wait_for_frames上面再多加一個等待的秒數
沒有實測過
|
然後還有一個
rs.frame_queue()
這個是可以先把影像存在記憶體中,等到有資源時再處理,主要是避免在串流即時影像時因為資源不夠而落幀
4/24:
poll_for_frames因為可以回傳Null值,所以如果接收端有Null就會error
加上一段:
if not depth_frame or not color_frame:
continue
就可以了
這邊稍微提到一下,接下來是這次主要提取的一些屬性
在Hello World裡面開始有一些基本的幀的屬性
width = depth_frame.get_width()
height = depth_frame.get_height()
dist = depth_frame.get_distance(width / 2, height / 2)
回傳了寬度跟高度
然後找到畫面中央,然後回傳這個點的距離
接下來是frame的屬性
get_distance是只有rs.depth_frame才有的屬性
然後它的深度有多準呢?
它顯示值可以到76公尺遠,實測距離最多10公尺
辦公室內我測到8公尺都還算準,但是在室外大約5~6公尺的非垂直物體 長度2公尺 誤差大約+-10公分
5公尺內大概在誤差5公分內
基本上算是可接受的誤差範圍,不過未來要計算面積的話勢必誤差會更大了
接下來就不只是pyrealsense還有opencv了
key = cv2.waitKey(1)
這個是指每一次處理的畫面停留1豪秒
所以就是即時影像了,不論是30FPS 還是6
當值為0的時候就是停留
最後
if key & 0xFF == ord('q') or key == 27:
break
如果按Q ESC 就離開
離開之後break就會離開while loop
最後pipeline.stop()
結束整個影像串流
-----------------------------------------------------------------------------------------------------------------------
直到第一個自己寫出的程式花了不少時間,從看懂它的資料庫跟使用方法
然後 身為一個新手 我一直到很後面 measure都寫完了 才學了class
所以在這時候 很多功能 後面要不要加()
沒有的時候是method 有的時候是object
不過直到現在,要使用沒有範例,直接從python.cpp裡面找到的功能,也還是要嘗試很多次
畢竟我沒學過C++ 所以在對照的時候也花了不少心力 才看懂了它的結構
下一步就會進入相機的設定值
在config下面可以加上很多的調控
敬請期待,也麻煩有同樣在做pyrealsense的前輩們多多指點 可以留言或是email給我囉
width = depth_frame.get_width()
height = depth_frame.get_height()
dist = depth_frame.get_distance(width / 2, height / 2)
回傳了寬度跟高度
然後找到畫面中央,然後回傳這個點的距離
接下來是frame的屬性
get_width
| 寬度 |
get_height
| 高度 |
get_stride_in_bytes
| |
get_bits_per_pixel
| 每一個像素的大小 |
get_bytes_per_pixel
| 同上 |
get_distance是只有rs.depth_frame才有的屬性
然後它的深度有多準呢?
它顯示值可以到76公尺遠,實測距離最多10公尺
辦公室內我測到8公尺都還算準,但是在室外大約5~6公尺的非垂直物體 長度2公尺 誤差大約+-10公分
5公尺內大概在誤差5公分內
基本上算是可接受的誤差範圍,不過未來要計算面積的話勢必誤差會更大了
接下來就不只是pyrealsense還有opencv了
key = cv2.waitKey(1)
這個是指每一次處理的畫面停留1豪秒
所以就是即時影像了,不論是30FPS 還是6
當值為0的時候就是停留
最後
if key & 0xFF == ord('q') or key == 27:
break
如果按Q ESC 就離開
離開之後break就會離開while loop
最後pipeline.stop()
結束整個影像串流
-----------------------------------------------------------------------------------------------------------------------
直到第一個自己寫出的程式花了不少時間,從看懂它的資料庫跟使用方法
然後 身為一個新手 我一直到很後面 measure都寫完了 才學了class
所以在這時候 很多功能 後面要不要加()
沒有的時候是method 有的時候是object
不過直到現在,要使用沒有範例,直接從python.cpp裡面找到的功能,也還是要嘗試很多次
畢竟我沒學過C++ 所以在對照的時候也花了不少心力 才看懂了它的結構
下一步就會進入相機的設定值
在config下面可以加上很多的調控
敬請期待,也麻煩有同樣在做pyrealsense的前輩們多多指點 可以留言或是email給我囉


Comments
Post a Comment