RealSense learning/turtorial/sharing blog - Chapter Two: More Device Adjustments
So, after the hello world, more controls over the device.
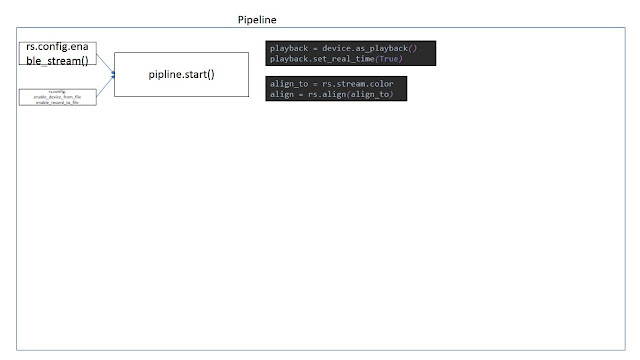
So the pipeline is basically start/stop, and wait_for_frames
And the function of pipeline_profile I haven't know yet
in this part I will put in the controls before wait_for_frames,
device = profile.get_device()
depth_sensor = device.first_depth_sensor()
depth_sensor.set_option(rs.option.visual_preset, 4)
dev_range = depth_sensor.get_option_range(rs.option.visual_preset)
preset_name = depth_sensor.get_option_value_description(rs.option.visual_preset, 4)
https://github.com/IntelRealSense/librealsense/wiki/D400-Series-Visual-Presets#related-discussion
This part is setting the preset as in the Realsense Viewer, and in my need is the preset 4, high density.
The dorodnic of intel he wrote on loop to loop through the presets.
which he mentioned the preset numbers are changing all the time, I suppose its among other devices, at least in this same machine it stays
recorder = device.as_recorder()
pause = rs.recorder.pause(recorder)
playback = device.as_playback()
playback.set_real_time(False)
playback.pause()
playback.resume()
Recorder will start recording when in the configuration set,with function or .pause() and .resume()
And the next is playback
This is playing the recorded bag file
depth_stream = profile.get_stream(rs.stream.depth)
inst = rs.video_stream_profile.intrinsics
#get intrinsics of the frames
depth_intrin = depth_frame.profile.as_video_stream_profile().intrinsics
color_intrin = color_frame.profile.as_video_stream_profile().intrinsics
depth_to_color_extrin = depth_frame.profile.get_extrinsics_to(color_frame.profile)
These are getting some data of the camera and streams, i use intrinsic to get the calibration while projecting pixels to 3D coordinations
Otherwise I have no other use for them yet, as I go through the files the usage would be more in 3D models also, while creating by scanning, the accuracy is a lot more important in smaller scales
So the pipeline is basically start/stop, and wait_for_frames
And the function of pipeline_profile I haven't know yet
in this part I will put in the controls before wait_for_frames,
including record file, read file, and others
enable_stream
|
Define the stream type and also width/height...
|
enable_all_streams
|
Turn on all streams at once
|
enable_device
|
Input “serial”
|
enable_device_from_file
|
(“filename”,True/False) for repeat_playback or not, either once to the end, or keep looping
|
enable_record_to_file
|
(“filename.bag”)
|
disable_stream
|
(“stream”,”index”)
|
disable_all_streams
| |
resolve
| |
can_resolve
|
the enable stream is mentions before,
config.enable_stream(rs.stream.depth, 640, 360, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
The options can be found in the Intel Realsense Viewer, color,depth,infrared, resolution, mode, fps.
and the rest is more related when multiple devices were used
config.enable_record_to_file(file_name)
config.enable_from_device(filename)
config.enable_stream(rs.stream.depth, 640, 360, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
The options can be found in the Intel Realsense Viewer, color,depth,infrared, resolution, mode, fps.
and the rest is more related when multiple devices were used
config.enable_record_to_file(file_name)
config.enable_from_device(filename)
these are when recording or reading
enable from device have the option True/False
allow replay or just loop once through all the frame and end
If False, it will be the Runtimeerror of "no frames arrived in 5000"
thats why I had the except in the try loop
--------------------------------------------------------------------------------------------------------------------
device = profile.get_device()
depth_sensor = device.first_depth_sensor()
depth_sensor.set_option(rs.option.visual_preset, 4)
dev_range = depth_sensor.get_option_range(rs.option.visual_preset)
preset_name = depth_sensor.get_option_value_description(rs.option.visual_preset, 4)
https://github.com/IntelRealSense/librealsense/wiki/D400-Series-Visual-Presets#related-discussion
This part is setting the preset as in the Realsense Viewer, and in my need is the preset 4, high density.
The dorodnic of intel he wrote on loop to loop through the presets.
recorder = device.as_recorder()
pause = rs.recorder.pause(recorder)
playback = device.as_playback()
playback.set_real_time(False)
playback.pause()
playback.resume()
Recorder will start recording when in the configuration set,with function or .pause() and .resume()
And the next is playback
This is playing the recorded bag file
pause
|
Pause and resume, while resume it always turn really slow and lag, until it catch up with the frames
|
resume
| |
file_name
|
I haven’t use these functions
|
get_position
| |
get_duration
| |
is_real_time
|
Set to the real time behavior as recorded time
|
set_real_time
|
Usually I set to set_real_time(False) so I can go through each frame to measure, or else the pipeline will keep the frames looping as real time behavior when its (True)
|
config.enable_record_to_file(file_name)
|
So I suppose it can open one bag and record this playback to a new file, while
rs.config.enable_device_from_file(config, '123.bag')
Does Not enable the same time
config.enable_record_to_file(file_name)
|
current_status
|
Intrinsic/Extrinsic
depth_stream = profile.get_stream(rs.stream.depth)
inst = rs.video_stream_profile.intrinsics
#get intrinsics of the frames
depth_intrin = depth_frame.profile.as_video_stream_profile().intrinsics
color_intrin = color_frame.profile.as_video_stream_profile().intrinsics
depth_to_color_extrin = depth_frame.profile.get_extrinsics_to(color_frame.profile)
These are getting some data of the camera and streams, i use intrinsic to get the calibration while projecting pixels to 3D coordinations
Otherwise I have no other use for them yet, as I go through the files the usage would be more in 3D models also, while creating by scanning, the accuracy is a lot more important in smaller scales
------------------------------------------------------------------------------------------------------------------
So this part is without example codes because it's a more general usage for all files
which will be used in most further codes I will be demonstrating.
and I just got the use of turn off auto exposure today, will put it in in the future
the usage of turning it off is for not drop frames.
this is also one of my major issues
I need to make it act as a camera, and every frame I took should be reachable
but the wait_for_frame is currently not giving me all the frames, and also not recording or recorded too much
if any pros saw this, please write in the comments or send me an email about this topic.
thank you!


Comments
Post a Comment