RealSense 學習筆記/教學/分享(四):計算兩點實際距離
好的,錄製了深度跟色彩兩幅畫面並且把他們配對好之後呢,接下來就是主要任務了
要計算兩點的距離
如果說要介面,Python已經有十分多的選擇可以選
我最後選了matplotlib來作為工具
第一版本我用了opencv
設定了左鍵按下,按住然後放開
def measure (event,x,y,flags,param):
global xi,yi,x0,y0
if event == cv2.EVENT_LBUTTONDOWN:
xi,yi = x,y
print 'xi,yi= ' + str(xi) + ',' + str(yi)
return xi,yi
elif event == cv2.EVENT_LBUTTONUP:
x0,y0 = x,y
print 'x0,y0= ' + str(x0) + ',' + str(y0)
calculate_3D(xi, yi, x0, y0)
return x0,y0
然後得到的距離顯示演進像是以下
我最一開始的簡略版
用最弱的print

看不到選到的地方,然後就是跳出一個視窗說多遠


import ctypes
from ctypes import c_int, WINFUNCTYPE, windll
from ctypes.wintypes import HWND, LPCWSTR, UINT
prototype = WINFUNCTYPE(c_int, HWND, LPCWSTR, LPCWSTR, UINT)
paramflags = (1, "hwnd", 0), (1, "text", "Hi"), (1, "caption", "Result"), (1, "flags", 0)
MessageBox = prototype(("MessageBoxW", windll.user32), paramflags)


首先先有路的線
 點開就會跳出matplotlib視窗
點開就會跳出matplotlib視窗
 按左鍵即可測量
按左鍵即可測量

要計算兩點的距離
如果說要介面,Python已經有十分多的選擇可以選
我最後選了matplotlib來作為工具
第一版本我用了opencv
設定了左鍵按下,按住然後放開
def measure (event,x,y,flags,param):
global xi,yi,x0,y0
if event == cv2.EVENT_LBUTTONDOWN:
xi,yi = x,y
print 'xi,yi= ' + str(xi) + ',' + str(yi)
return xi,yi
elif event == cv2.EVENT_LBUTTONUP:
x0,y0 = x,y
print 'x0,y0= ' + str(x0) + ',' + str(y0)
calculate_3D(xi, yi, x0, y0)
return x0,y0
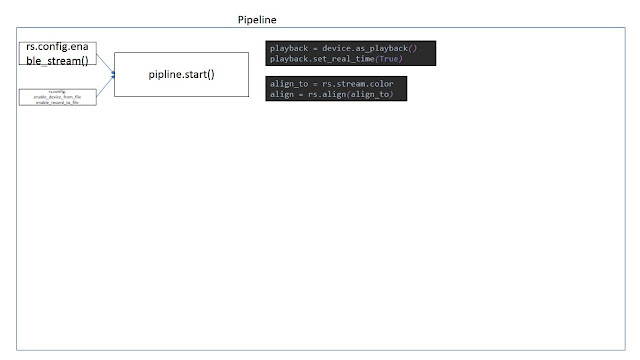
定義了起點跟終點之後 就是計算距離
運用到depth_frame, color intrinsics兩個參數
一個是取到距離 另外一個是用來轉換pixel座標到3D空間座標用的
其實數學部分很簡單,就是根號x y z的平方
不過我在找計算面積,用向量或是其他解,發現好像目前辦不到,太難了
其實數學部分很簡單,就是根號x y z的平方
不過我在找計算面積,用向量或是其他解,發現好像目前辦不到,太難了
def calculate_3D (xi, yi, x0, y0):
udist = depth_frame.get_distance(xi, yi)
vdist = depth_frame.get_distance(x0, y0)
print udist, vdist
point1 = rs.rs2_deproject_pixel_to_point(color_intrin, [xi, yi], udist)
point2 = rs.rs2_deproject_pixel_to_point(color_intrin, [x0, y0], vdist)
print 'start(x,y,z): '+ str(point1)+'\n' + 'end(x,y,z): ' +str(point2)
dist = math.sqrt(
math.pow(point1[0] - point2[0], 2) + math.pow(point1[1] - point2[1],2) + math.pow(
point1[2] - point2[2], 2))
cm = dist * 100
decimal2 = "%.2f" % cm
print 'Vermessung: ' + str(decimal2)+ 'cm'
MessageBox(text='Vermessung: ' + decimal2 + ' cm')
我最一開始的簡略版
用最弱的print

看不到選到的地方,然後就是跳出一個視窗說多遠

用這個顯示出視窗
import ctypes
from ctypes import c_int, WINFUNCTYPE, windll
from ctypes.wintypes import HWND, LPCWSTR, UINT
prototype = WINFUNCTYPE(c_int, HWND, LPCWSTR, LPCWSTR, UINT)
paramflags = (1, "hwnd", 0), (1, "text", "Hi"), (1, "caption", "Result"), (1, "flags", 0)
MessageBox = prototype(("MessageBoxW", windll.user32), paramflags)
但是這真的是太簡陋了,剛好在這個討論串有人寫了Ruler工具
於是我就改用matplotlib然後改寫了他的工具作為3D測量用
(其實我在做這裡的時候還不會OOP(Object-oriented programming) 所以弄一弄竟然能用了XD
改寫的有
兩點座標的輸出
@property
@property
def ruler_length(self):
line_pp = self.ruler.get_path().vertices
x0 = line_pp[0][0]
y0 = line_pp[0][1]
x1 = line_pp[1][0]
y1 = line_pp[1][1]
xa,xb,ya,yb = int(x0),int(x1),int(y0), int(y1)
depth_frame = self.depth_frame
color_intrin = self.color_intrin
ant = self.calculate_3D(xa,xb,ya,yb,depth_frame,color_intrin)
return ant
定義3D距離
def calculate_3D(self, xa,xb,ya,yb,depth_frame,color_intrin):
udist = depth_frame.get_distance(xa, ya)
vdist = depth_frame.get_distance(xb, yb)
point1 = rs.rs2_deproject_pixel_to_point(color_intrin, [xa, ya], udist)
point2 = rs.rs2_deproject_pixel_to_point(color_intrin, [xb, yb], vdist)
dist = math.sqrt(
math.pow(point1[0] - point2[0], 2) + math.pow(point1[1] - point2[1], 2) + math.pow(
point 1[2] - point 2[2], 2))
cm = dist * 100
decimal 2 = "%.2f" % cm
return decimal 2

到這一步,大致是把在範例裡面用C++寫的工具轉到python裡面成功使用了
只能說 滿不容易的
到這邊大約三個禮拜過去了
下一個階段就是在測量的精準度上提升了
會針對上一篇提到的不相應幀的修正
其實現在回頭看,這裡就比較偏向GUI的部分了,要做出好的圖形介面給其他人使用
從最初只能從shell裡面看到結果 到視窗 到最後的借用別人的工具
-------------------------------------------------------------------------------------------------------------
在這段之後,接著我把這個嫁接到ArcMap上面,用hyperlink可以打開
hyperlink 可以用 Script 打開

所以看起來就萬事太平了
結果因為realsense本身的程式碼還有缺陷,在我需要的設定下會凍結
pipeline.stop()執行後程式就死了
原本用import直接打開應該是最順的,結果一天到晚arcgis沒有回應,不行
後來嘗試了multithread/multiprocess 結果32位元的ArcGIS並不支援,難怪現在要做arcGISpro
首先先有路的線



後來用了繞很遠的方法:
subprocess.call("cmd")
叫出了指令,然後在script裡面下指令 把道路的ID跟檔案位置丟進去
CMD打開python measure.py -w 道路編號 --path 路徑 --num 照片編號
最後就可以避免沒有回應 可喜可賀 可喜可賀
但是還是有小缺點,因為arcmap沒有辦法多線程操作,所以在打開這個CMD視窗的時候,arcmap本身是凍結狀態的,關掉視窗才會回復可操作的狀態,不過目前這樣已經很滿意了


Comments
Post a Comment