RealSense 學習筆記/教學/分享(五):用新的相機程式碼解釋Multiproccesing
之前完成的相機程式跟Arcmap plugin都做好之後,就正式投入使用啦
不過中間也是經過幾般波折,出去測試半天之後,還在調整
然後說想要再測試,結果直接被派了一個三天兩夜...
完全傻眼的結果,於是就在車上邊調整程式碼
然後呢,當我弄到夠自動化可以司機自己去時,我發現我沒有電腦了,因為被帶走了
於是公司又給了我一台,可是呢,果然,又是一個2014年的基本款文書機
4GB ram,HDD,唯一可以的大概就...i5 這樣
但是2014跟2018的i5,還是有差,加上HDD、ram的差別,整個電腦完全跑不動
然後,又是尚未測試,就派出去了,耶 一天的空資料
於是乎,我就開始把原本的multithread改成multiprocess
從多線程改成多進程
我就來介紹一下我的最後成果
首先,在multiprocces多個核心中,執行的模式:Pool, Proccess
Pool是作為重複執行同樣的function,然後可以指定幾個核心操作
而 Process就是分開一個child執行,可以指定 start, join, terminate
(這邊我有一個卡住的點,原來一個child 不能終止另外一個child,
我原本用一個子進程傳送指令 if xxx: break,結果直接整個freeze)
要傳輸資料的形式有幾種:
單向傳輸不限內容:


不過中間也是經過幾般波折,出去測試半天之後,還在調整
然後說想要再測試,結果直接被派了一個三天兩夜...
完全傻眼的結果,於是就在車上邊調整程式碼
然後呢,當我弄到夠自動化可以司機自己去時,我發現我沒有電腦了,因為被帶走了
於是公司又給了我一台,可是呢,果然,又是一個2014年的基本款文書機
4GB ram,HDD,唯一可以的大概就...i5 這樣
但是2014跟2018的i5,還是有差,加上HDD、ram的差別,整個電腦完全跑不動
然後,又是尚未測試,就派出去了,耶 一天的空資料
於是乎,我就開始把原本的multithread改成multiprocess
從多線程改成多進程
我就來介紹一下我的最後成果
首先,在multiprocces多個核心中,執行的模式:Pool, Proccess
Pool是作為重複執行同樣的function,然後可以指定幾個核心操作
而 Process就是分開一個child執行,可以指定 start, join, terminate
(這邊我有一個卡住的點,原來一個child 不能終止另外一個child,
我原本用一個子進程傳送指令 if xxx: break,結果直接整個freeze)
要傳輸資料的形式有幾種:
單向傳輸不限內容:
- Queues: 這個會將資料儲存然後等候處理,用put(), get()處理 (我在用的時候,就會因為電腦處理太慢,一秒相機給30幀,但是電腦無法跟上,就會出現lag 畫面,整個慢動作,直到記憶體爆掉)
- Pipes: 這是作為單向傳輸,指定一個輸出一個輸入,只要同時有超過一個進程在寫入或是讀取,就會錯誤
- Value: 可以輸入值,"i", "d" 分別指 integer, double兩種數字型態,我在這裡用在傳送相機/GPS的狀態,運用True/False, 不過接收端不能用 = True 更不能 is True,而是要用 =1
- Array: 可以輸入矩陣,也是指定"i" "d" 傳輸list,我用在傳輸GPS位置 經緯度分別為double,然後照片編號,用integer
- Manager:可以傳輸 list, dict, Namespace, Lock, RLock, Semaphore, BoundedSemaphore, Condition, Event, Queue, Value and Array. (這個我還沒有用,不過我應該可以在未來把我的程式裡面分別的value: camera_on, camera_repeate, gps_on, gps_ready, take_a_picture 這些指令寫進一個dict來傳送)
好了 基本的元素都具備了,那就來看我怎麼處理我的程式
主要是三個 一個是 realsense,相機的操作,第二個是opencv,負責視覺化跟接收鍵盤指令,第三個則是GPS,會先輸出一個gps_on,然後就會持續送出新的經緯度資料
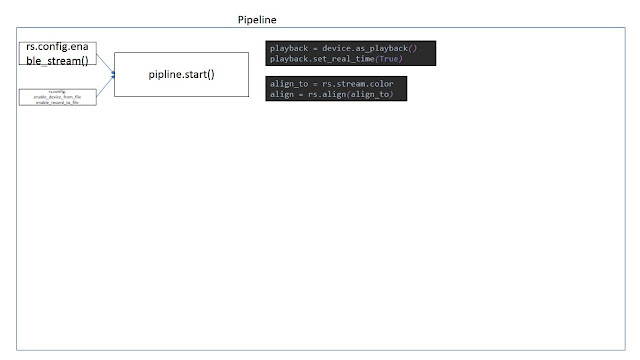
以下是我的傳輸圖
第一個區塊
於是,我先打開child process: GPS
等到回傳GPS收到訊號,才會開啟相機
打開相機之後,就會再分出child, opencv
這樣設計主要是考量到,相機只要沒有最後完整的 pipeline.close()就會存檔錯誤,所以一定不能用 terminate, 放在main process最穩
所以 main相機負責儲存bag, opencv負責儲存txt,csv作為司機放進QGIS看目前位置跟已經拍過照片的位置,GPS就專門負責一直傳送新的GPS位置,不過也可以把寫目前位置的CSV丟給GPS這個做
然後三個process都會以 while loop持續運作,所以要避免重複下達指令的情況
是甚麼情況呢? 就是在相機接收到第一個拍一張照片時,會花大約30毫秒完成這個動作
但是這30毫秒內,opencv會繼續下下一個拍照的指令,造成重複拍照或是如果還沒有新的GPS位置,拍出來的照片還在原位,也是不行
所以,我後來在opencv裡面加了一個 local_take_pic的操作,當符合條件(距離/鍵盤指令)之後,會再檢查一次是不是有更新資料,才會由value下指令拍照
另外主要還是以 if take_pic == 1 or current_location == photo_location: continue 做為保險
就是如果相機還沒回傳拍完照片,take_pic == 0(False),或是GPS點位沒有更新,就不會繼續執行接下來的動作
儘管如此,這台電腦還是無法應付30幀的資料,6幀則會固定黑掉,15幀是最後的結果。
所以,向上支援比向下支援好做多了阿
用一台可憐的老電腦跑,真的也是
最後附上我的成果


Comments
Post a Comment